Robotics
Project Status: 100%
ECE 4180 Final Project
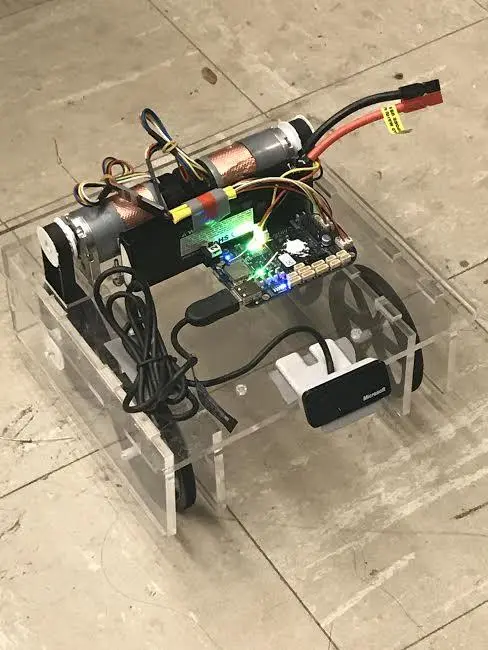
The goal of this project was to create a single board robot capable of interfacing with four motors including encoder feedback. A single board allows for a clean setup, reducing probability of errors during competition. The issue is the neccesity for a high level linux machine to make decision needing to be paried with a low level real time controller, in our case, the Beagle Bone Blue Programmable Real Time Units.
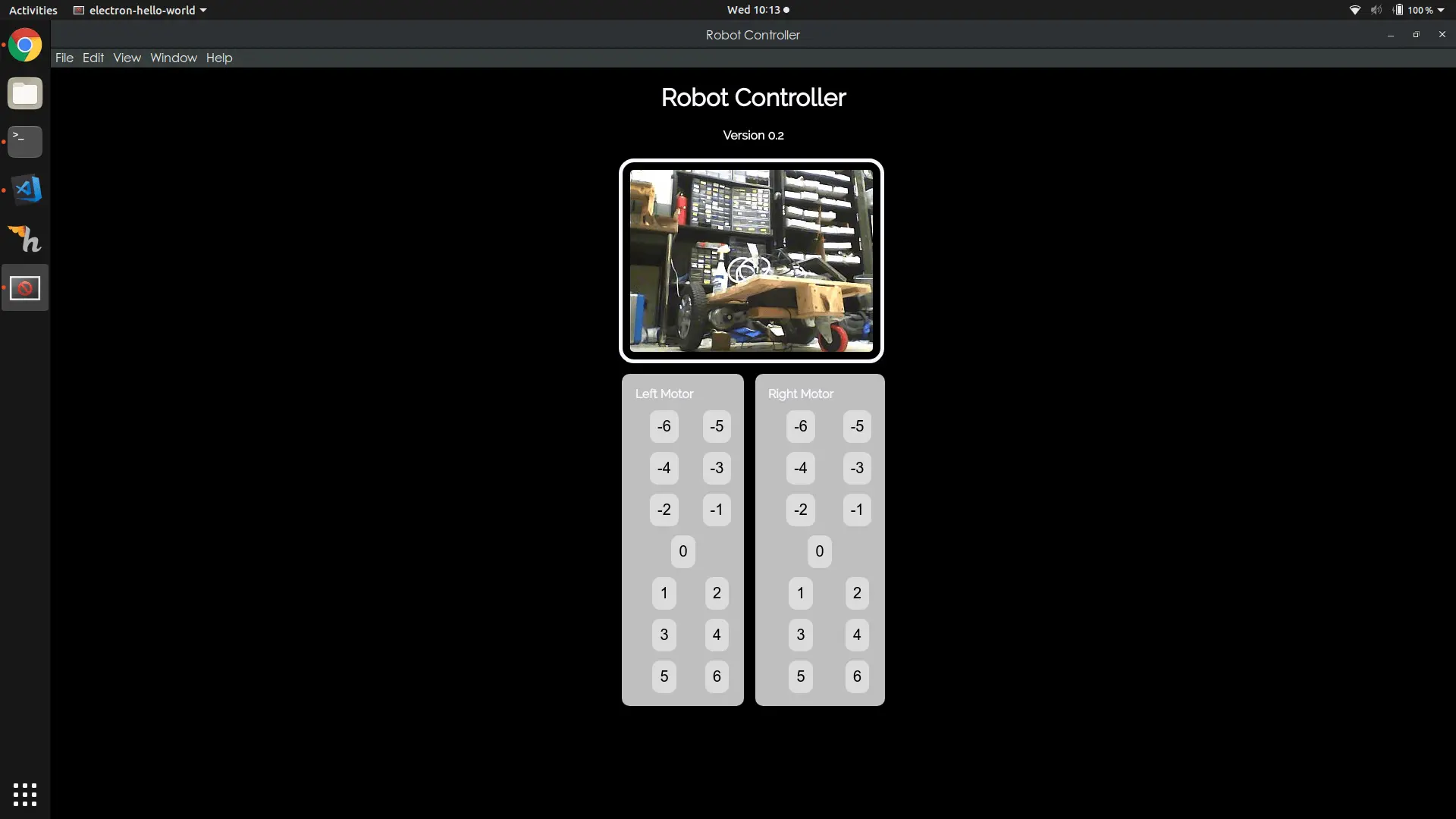
This project is interfaced with a software gui over the internet or via adhoc wifi. There is also a live streamed webcam so this robot can be completely controlled from anywhere in the world.
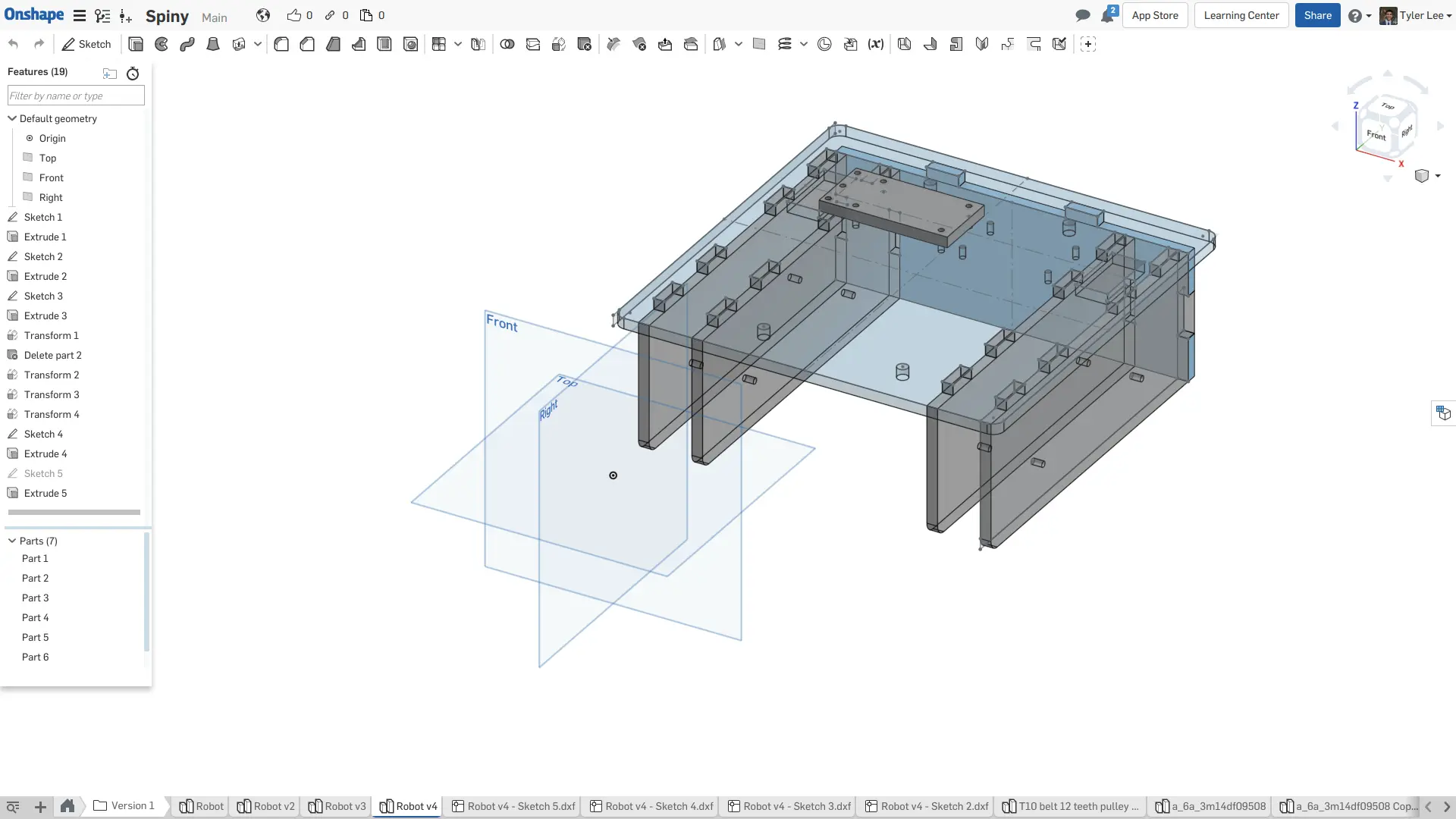
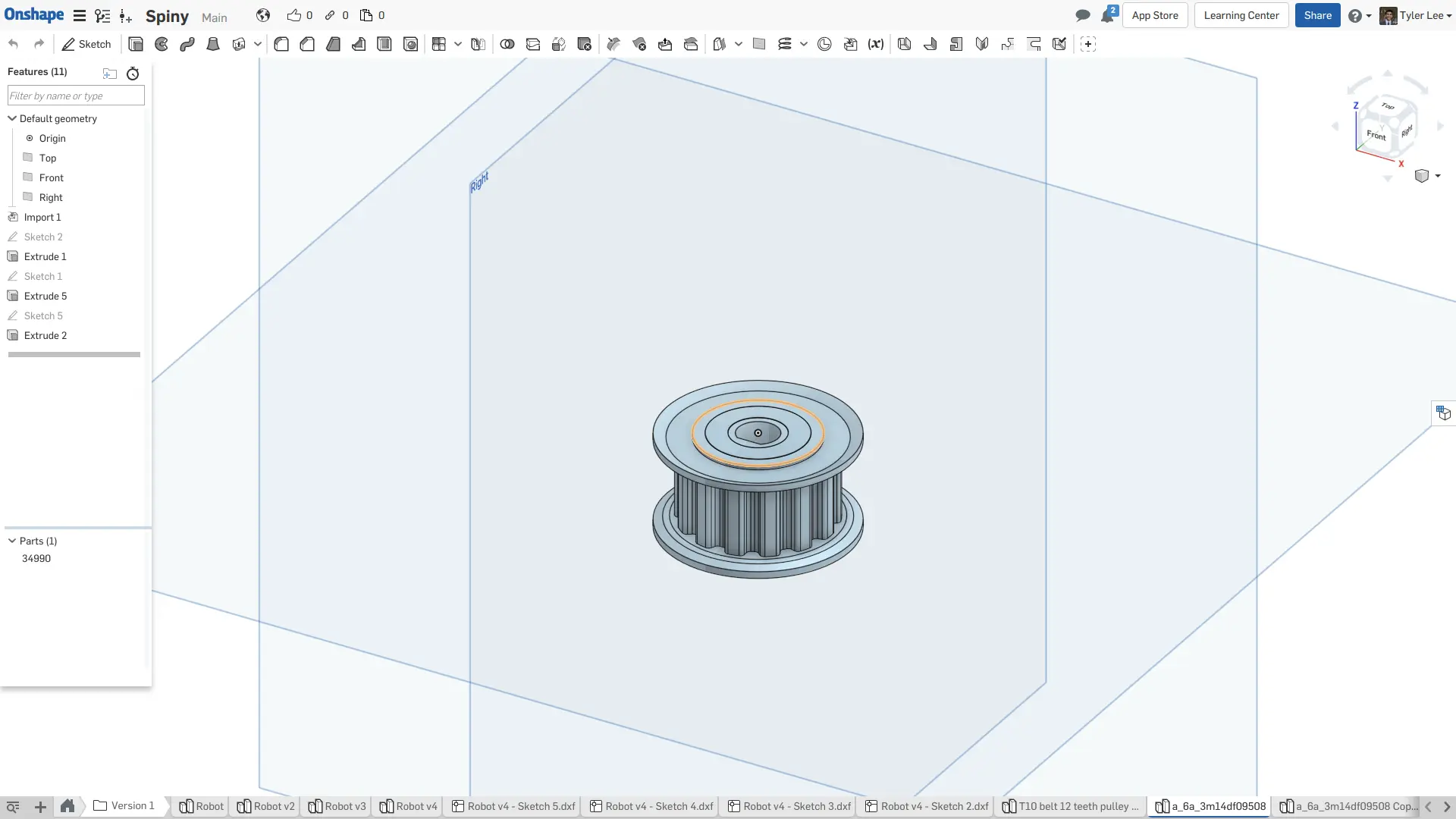
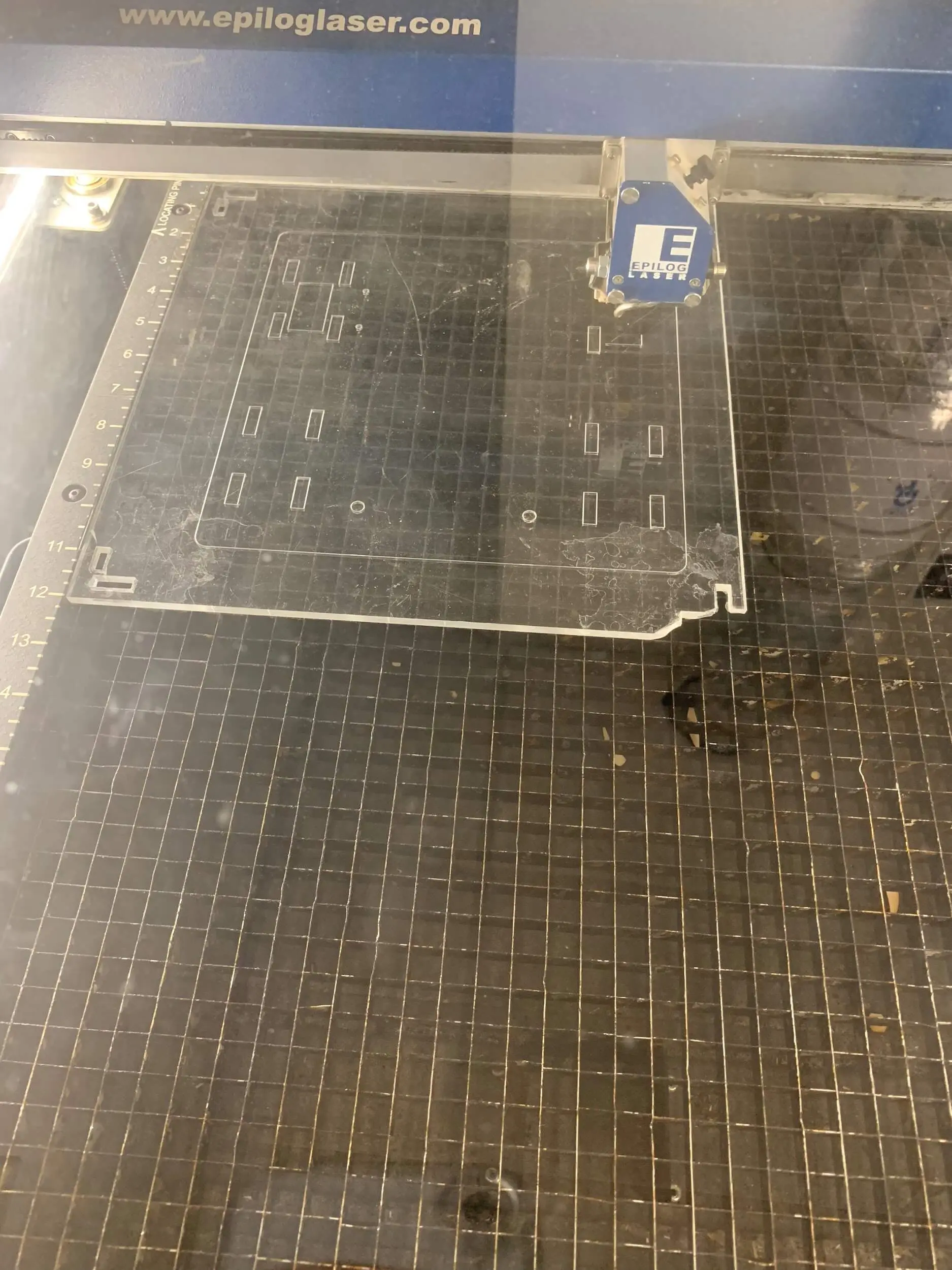
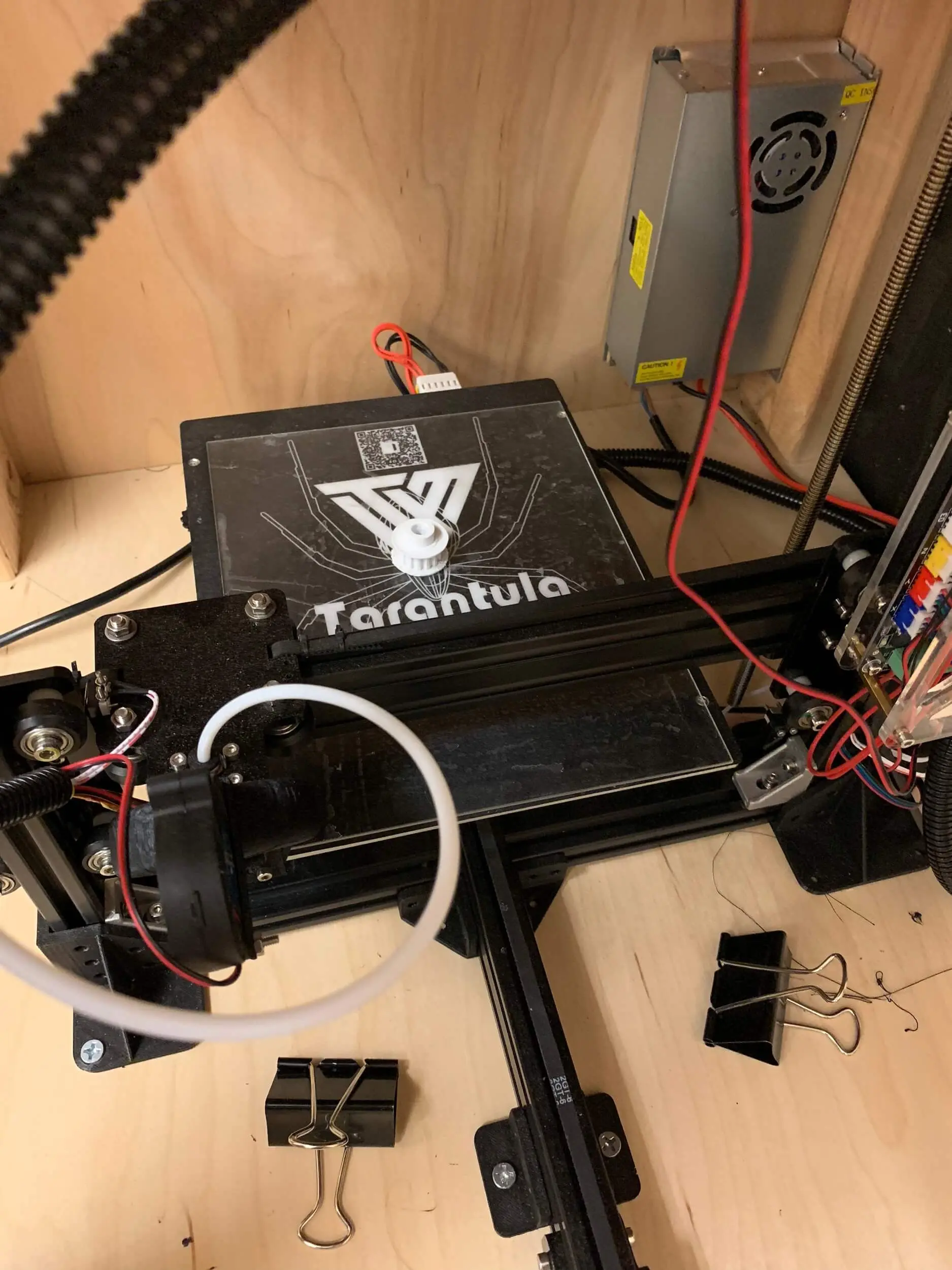
Mechanical
The structure of this robot is based around the Southeastcon 2019 design paraeters. It was CAD’d in Onshape and the frame was laser cut with spare acryllic. The timing belt pulleys were 3D printed to ensure locking fits on teh bearings and keyed to fit the motor.

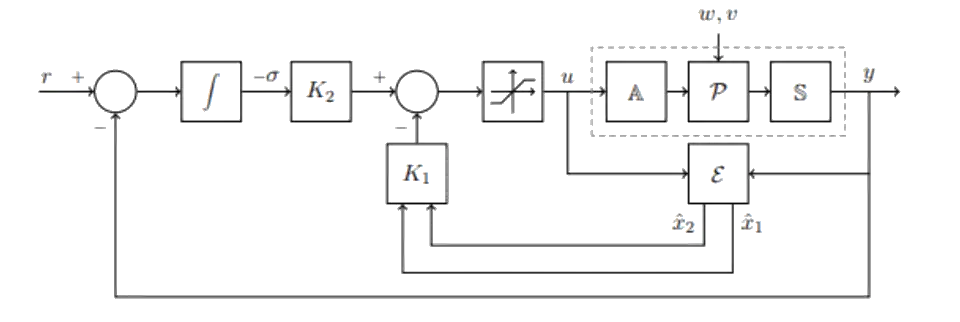
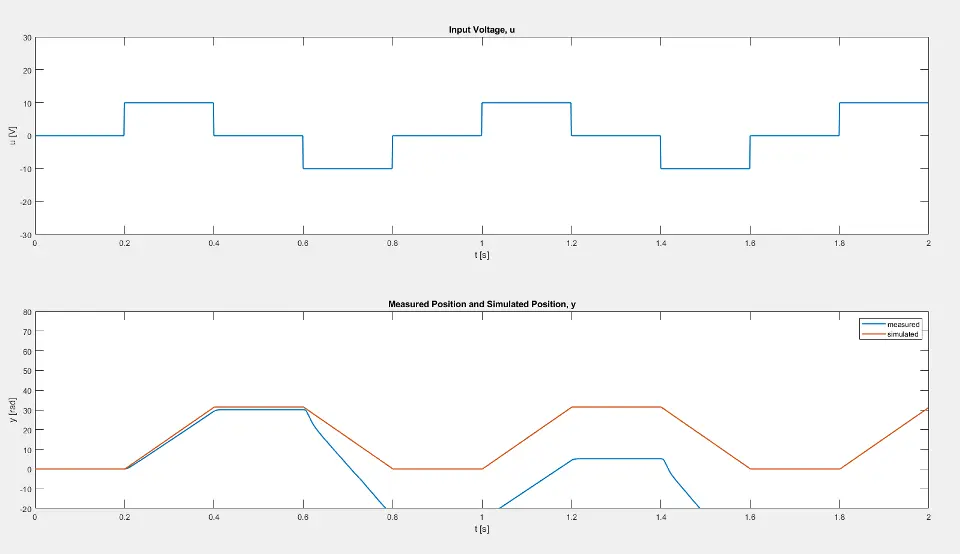
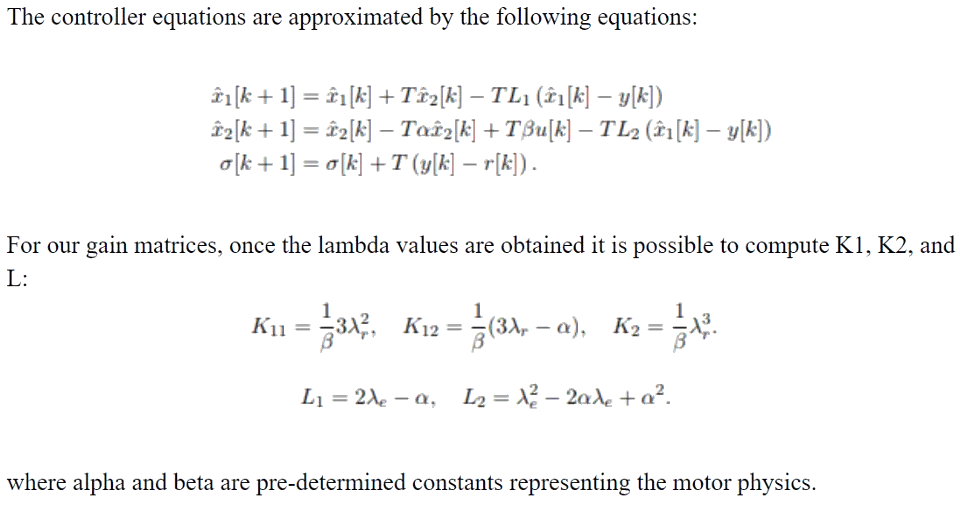
PRU State Space Controller
The Programmable Real Time units on the Beagle Bone Blue operate at 200 MHz which more than enough to poll several brushless DC motor encoders (roughly 3600 counts per rotation of the motor). The encoder controller is a state space controller programmed via a file from the linux kernel, tuned appropriately to the motors.
Software
The software to control the robot is written using Electron which is a javascript based chromium web app running in a desktop window. The interface to the camera is a live stream web app running on the beagle bone ported into the GUI and the speed control options for each motor use ssh-keys to authenticate a signal file transfer (which is then interpretted by the PRU).